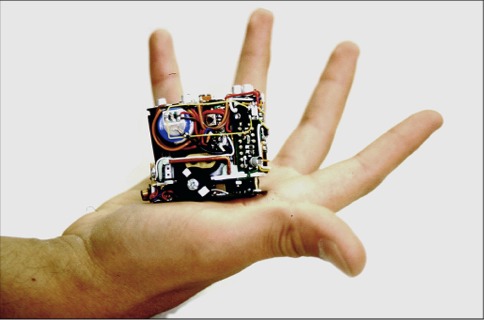
Mobile microrobot built in a concentric-layer architecture to maximize component density and minimize power consumption.
Autonomous micro robots are expected to enable many new technological applications, from the exploration of hostile environments to the execution of minimally invasive surgeries. The autonomy of most microrobots, however, is extremely limited due to the small capacity of their energy sources. At Universidad Iberoamericana I developed a concentric-layer miniaturization technique to produce highly compact, energy-efficient microrobot designs. In less than 80 cc the prototype built with this technique concentrated more functionalities than other robots twice as big or larger. The predetermined robot volume was structured into concentric layers where mechanical parts, flexible electronic boards, batteries and other parts were assembled together. With this design approach the robot becomes a lightweight nearly monolithic unit. With a single charge (1 W power) the device was able to operate for 1 hr without performance deterioration or loss of communication within a radius of 15 m. The external modules of the robot were built the same way and assembled to the robot in their corresponding layer to augment the functionality of the system. A full patent for this work was issued Feb. 12, 2004. IMPI 219191, Mexico.
Autonomous micro robots are expected to enable many new technological applications, from the exploration of hostile environments to the execution of minimally invasive surgeries. The autonomy of most microrobots, however, is extremely limited due to the small capacity of their energy sources. At Universidad Iberoamericana I developed a concentric-layer miniaturization technique to produce highly compact, energy-efficient microrobot designs. In less than 80 cc the prototype built with this technique concentrated more functionalities than other robots twice as big or larger. The predetermined robot volume was structured into concentric layers where mechanical parts, flexible electronic boards, batteries and other parts were assembled together. With this design approach the robot becomes a lightweight nearly monolithic unit. With a single charge (1 W power) the device was able to operate for 1 hr without performance deterioration or loss of communication within a radius of 15 m. The external modules of the robot were built the same way and assembled to the robot in their corresponding layer to augment the functionality of the system. A full patent for this work was issued Feb. 12, 2004. IMPI 219191, Mexico.
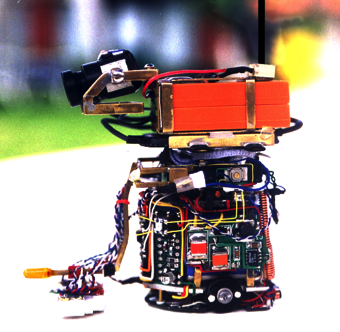
The microrobot with installed external modules for optical line tracking, video capture and wireless video transmission. The videocamera is held in place by an articulated clamp attached to the module batteries (orange).